导读:ADAS进入融合发展阶段 激光雷达、高精地图、处理平台是技术创新核心。由自动驾驶辅助向高度自动化驾驶发展,进入传感器融合、信息融合阶段。当前,ADAS 各子系统发展相对成熟,将由当前的自动驾驶辅助阶段向高度自动化阶段发展,将出现紧急制动、自动停车等功能。
参考《2016-2022年中国汽车智能化市场竞争态势及十三五投资决策分析报告》
由自动驾驶辅助向高度自动化驾驶发展,进入传感器融合、信息融合阶段。当前,ADAS 各子系统发展相对成熟,将由当前的自动驾驶辅助阶段向高度自动化阶段发展,将出现紧急制动、自动停车等功能。在走向高度自动化的过程中,ADAS 各项功能需要多种传感器融合才能实现,传感器融合、全面环境信息的融合是当前的发展趋势。
图表1:ADAS 变革蓝图

图表 2:ADAS 子系统中使用的技术需要多种传感器配合

处理平台、激光雷达、地图测绘技术是技术创新的核心。ADAS 系统必须具备感知环境、无需人力辅助的导航的能力。首先,需要雷达、激光雷达、GPS、视觉摄像头等技术帮助车辆感知周围的环境。其实,需要先进的控制系统(算法)利用感觉信息来识别适当的导航路径、障碍和相关标牌。
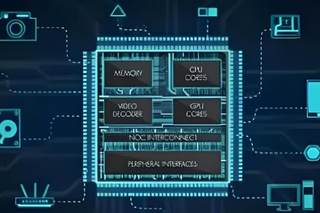
ADAS融合发展要求处理平台必须具备出众的数据梳理能力和优越的性能。1)多线程数据控制和出众的数据控制和管理能力。2)多个专门的矢量处理器处理 ADAS 相关的图像处理任务。3)接收来自摄像、激光雷达、雷达、超声波传感器等多个系统输入的信息。4)具备优越的计算能力和极低的功耗。
ADAS 需要实时性高、精细化、高精度的地图。高精度 ADAS 地图需要 1)基于地图测绘技术的可扩展摄像头。2)需要高精度的地图技术。3)提取标志性建筑和道路信息的能力。4)低带宽占用。5)云上的后端软件将所有车辆中机载软件上传的碎片信息整合到一个全球地图中。
激光雷达分辨率高,是建立精确的汽车周边环境地图的基础。1)激光雷达必须具备光的脉冲发射、反射的精确的时间记录功能。2)激光雷达器可以高精度的计算本身和靶之间距离。3)知道传感器的位置和定位,XYZ 反射面的坐标可以计算。4)激光雷达器通过快速连续地重复激光雷达器建立了复杂而精确的汽车周边环境的地图。
图表 3:自动驾驶车辆各元器件工作方式

图表 4:自动驾驶地图发展趋势

毫米波雷达将逐渐普及,长距或将成为主流、中短距或被摄像头系统替代 相比精度更高的激光雷达,毫米波雷达抗环境干扰能力强、稳定性高、应用范围广,将逐渐向低端车型普及。毫米波雷达在自动驾驶车辆中使用是通过反射行驶路程上的无线电波或微波来判断物体的范围、角度和速度等信息。汽车毫米波雷达目前用于碰撞预警以及盲点检测等系统中。
资料来源:公开资料,中国报告网整理,转载请注明出处(TYT)

【版权提示】观研报告网倡导尊重与保护知识产权。未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明、联系方式等发邮件至kf@chinabaogao.com,我们将及时沟通与处理。