3D视觉结构光方案产品整体结构分析
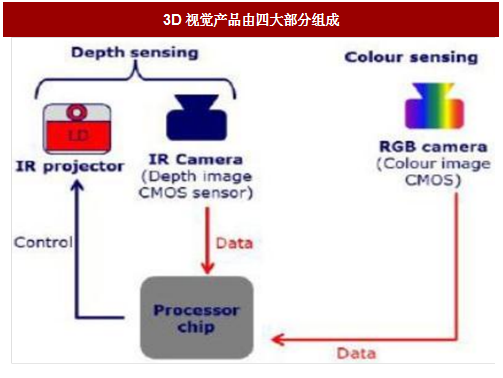
通过拆解结构光先驱Primesense的产品结构,可以看到整个结构光产品方案主要由四部分组成:TX发射部分(IRProjector,主要为红外光发射器IRLD)、RX接收部分(IRCamere,主要为红外光图像传感器IRCIS)、RGB可见光图像传感器(VisCIS)、专用数据处理芯片(ProcessorChip)。
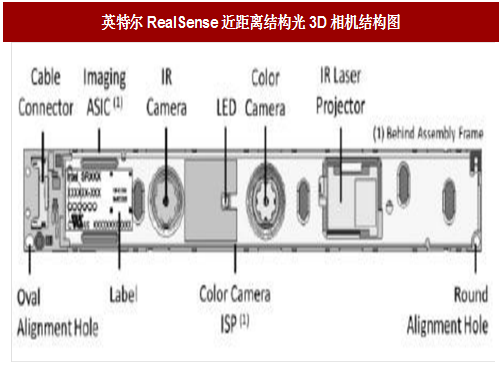
3D视觉结构光方案的产品结构,我们也可以在英特尔Realsense近距离结构光方案中得到证实。英特尔Realsense近距离3D视觉方案主要基于结构光原理,由一个红外发射器、一个红外传感器、一个可见光色彩传感器和一颗实感图像处理芯片组成。

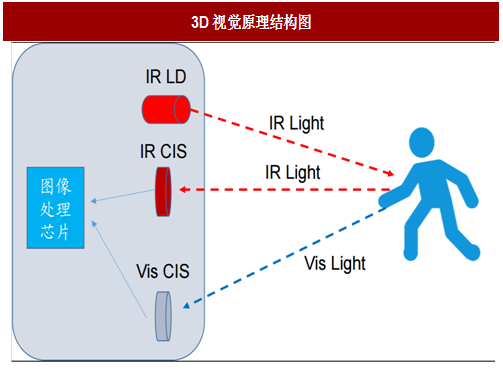
因此,我们可以总结出,典型结构光3D视觉系统的工作原理为:首先红外激光发射器(IRLD)发射出近红外光(IRLight)特定图案(如激光散斑等),经过物体(如人手或人脸等)的反射之后,形变之后的图案被红外图像传感器(IRCIS)所接收,经过算法计算出人手/人脸所处的位置(Z轴);同时,可见光图像传感器采集二维平面(X与Y轴)的人手/人脸信息(VisLight);两颗图像传感器的信息汇总至专用的图像处理芯片,从而得到三维数据,实现空间定位。
通过拆解结构光先驱Primesense的产品结构,可以看到整个结构光产品方案主要由四部分组成:TX发射部分(IRProjector,主要为红外光发射器IRLD)、RX接收部分(IRCamere,主要为红外光图像传感器IRCIS)、RGB可见光图像传感器(VisCIS)、专用数据处理芯片(ProcessorChip)。

图:3D视觉产品由四大部分组成
3D视觉结构光方案的产品结构,我们也可以在英特尔Realsense近距离结构光方案中得到证实。英特尔Realsense近距离3D视觉方案主要基于结构光原理,由一个红外发射器、一个红外传感器、一个可见光色彩传感器和一颗实感图像处理芯片组成。
参考中国报告网发布《2017-2022年中国机器视觉市场运营现状及发展策略研究报告》
红外发射器发射近红外光到物体表面,红外传感器与色彩传感器分别采集物体的深度图像和平面图像,最终经过实感芯片的处理得到三维位置信息。
图:英特尔RealSense近距离结构光3D相机

图:英特尔RealSense近距离结构光3D相机结构图
因此,我们可以总结出,典型结构光3D视觉系统的工作原理为:首先红外激光发射器(IRLD)发射出近红外光(IRLight)特定图案(如激光散斑等),经过物体(如人手或人脸等)的反射之后,形变之后的图案被红外图像传感器(IRCIS)所接收,经过算法计算出人手/人脸所处的位置(Z轴);同时,可见光图像传感器采集二维平面(X与Y轴)的人手/人脸信息(VisLight);两颗图像传感器的信息汇总至专用的图像处理芯片,从而得到三维数据,实现空间定位。

图:3D视觉原理结构图
资料来源:中国报告网整理,转载请注明出处(GQ)
更多好文每日分享,欢迎关注公众号

【版权提示】观研报告网倡导尊重与保护知识产权。未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明、联系方式等发邮件至kf@chinabaogao.com,我们将及时沟通与处理。