由于陀螺仪是惯性导航的核心部件,因此,可以按各种类型陀螺出现的先后、理论的建立和新型传感器制造技术的出现,将惯性技术的发展划分为四代。惯性导航技术的发展历史如下图所示,折线下方为该阶段建立的主要技术理论,上方为各阶段出现的惯性器件及其精度。不过,惯性技术发展的各阶段之间并无明显界线。
参考中国报告网发布《2017-2022年中国导航设备市场运营现状及发展趋势前瞻报告》
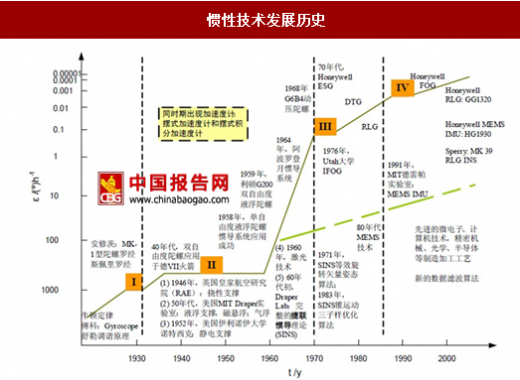
第一代惯性导航技术指 1930 年以前的惯性技术,奠定了整个惯性导航发展的基础。牛顿三大定律成为惯性导航的理论。1852年法国科学家傅科提出陀螺的定义、原理及应用设想;1908年德国科学家安修茨研制出世界上第1台摆式陀螺罗经; 1910年德国科学奖舒勒发现了陀螺罗经的无干扰条件,即舒勒调谐原理;美国人斯佩里于1911年、英国人S.G.布朗于1916年分别研制出以他们姓氏命名的陀螺罗经。前苏联也于20世纪30年代生产出方位仪及陀螺罗经。
第二代惯性技术开始于上世纪40年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。首先是惯性技术在德国V-II火箭上的第一次成功应用。到50年代中后期,0.5n mile/h的单自由度液浮陀螺平台惯性导航系统研制并应用成功。1968年,漂移约为0.005/h的G6B4型动压陀螺研制成功。这一时期,还出现了另一种惯性传感器-加速度计。在技术理论研究方面,为减少陀螺仪表支承的摩擦与干扰,挠性、液浮、气浮、磁悬浮和静电等支承悬浮技术被逐步采用;1960年激光技术的出现为今后激光陀螺的发展提供了理论支持;捷联惯性导航(SINS)理论研究趋于完善。
70年代初期,第三代惯性技术发展阶段出现了一些新型陀螺、加速度计和相应的惯性导航系统(INS),其研究目标是进一步提高INS的性能,并通过多种技术途径来推广和应用惯性技术。这一阶段的主要陀螺包括:静电陀螺(ESG)、动力调谐陀螺(DTG,也叫挠性陀螺)、环形激光陀螺(RLG)、干涉式光纤陀螺 IFOG 等。ESG的漂移可达10-4 /h;DTG的体积小、结构简单,随机漂移可达0.01 /h 量级;基于 Sagnac 干涉效应的环形激光陀螺和捷联式激光陀螺惯性导航系统(SINS)在民航方面得到应用,导航精度可达0.1n mile/h(海里/小时)。除此之外,超导体陀螺、粒子陀螺、音叉振动陀螺、流体转子陀螺及固态陀螺等基于不同物体原理的陀螺仪表相继设计成功。80年代,伴随着半导体工艺的成熟和完善,采用微机械结构和控制电路工艺制造的微机电系统(MEMS)开始出现。
当前,惯性技术正处于第四代发展阶段,其目标是实现高精度、高可靠性、低成本、小型化、数字化、应用领域更加广泛的导航系统。一方面,陀螺的精度不断提高,漂移量可达10-6 o/h;另一方面,随着激光陀螺、光纤陀螺、MEMS等新型固态陀螺仪的逐渐成熟,以及高速大容量的数字计算机技术的进步,捷联惯性导航系统在低成本、短期中精度惯性导航中呈现出取代平台式系统的趋势。要显著提高陀螺的敏感度,光波已经无法满足要求,在这种情况下,人们开始考虑利用原子波做波源。原子激光噪声小、波长短、频率高,可获得极高的灵敏度,因此原子陀螺及其系统具有极大的技术潜力。
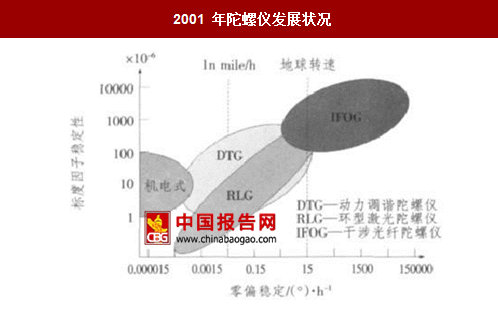
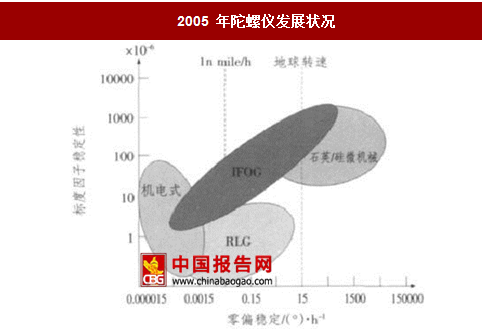
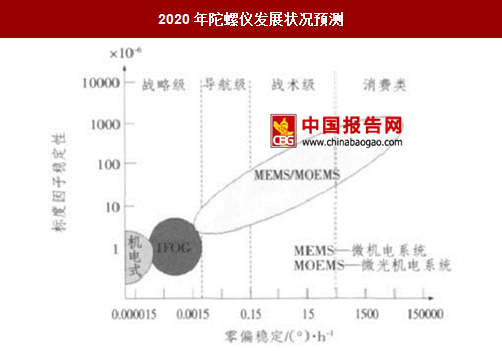
据MIT Draper实验室对美国下一代惯性传感器的发展和应用进行了分析和预测,以下分别是2001/2005年的发展情况,以及对2020年的发展预测。从三个时间点的发展可以看出,2005年中精度机械陀螺大部分被光学陀螺取代;2020年高精度陀螺应用领域主要由高精度机械陀螺和光纤陀螺占领;2020年微机电/微光机电陀螺占领中低精度应用领域。
陀螺仪发展状况
参考中国报告网发布《2017-2022年中国导航设备市场运营现状及发展趋势前瞻报告》
惯性技术发展历史

资料来源:中国报告网整理
第一代惯性导航技术指 1930 年以前的惯性技术,奠定了整个惯性导航发展的基础。牛顿三大定律成为惯性导航的理论。1852年法国科学家傅科提出陀螺的定义、原理及应用设想;1908年德国科学家安修茨研制出世界上第1台摆式陀螺罗经; 1910年德国科学奖舒勒发现了陀螺罗经的无干扰条件,即舒勒调谐原理;美国人斯佩里于1911年、英国人S.G.布朗于1916年分别研制出以他们姓氏命名的陀螺罗经。前苏联也于20世纪30年代生产出方位仪及陀螺罗经。
第二代惯性技术开始于上世纪40年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。首先是惯性技术在德国V-II火箭上的第一次成功应用。到50年代中后期,0.5n mile/h的单自由度液浮陀螺平台惯性导航系统研制并应用成功。1968年,漂移约为0.005/h的G6B4型动压陀螺研制成功。这一时期,还出现了另一种惯性传感器-加速度计。在技术理论研究方面,为减少陀螺仪表支承的摩擦与干扰,挠性、液浮、气浮、磁悬浮和静电等支承悬浮技术被逐步采用;1960年激光技术的出现为今后激光陀螺的发展提供了理论支持;捷联惯性导航(SINS)理论研究趋于完善。
70年代初期,第三代惯性技术发展阶段出现了一些新型陀螺、加速度计和相应的惯性导航系统(INS),其研究目标是进一步提高INS的性能,并通过多种技术途径来推广和应用惯性技术。这一阶段的主要陀螺包括:静电陀螺(ESG)、动力调谐陀螺(DTG,也叫挠性陀螺)、环形激光陀螺(RLG)、干涉式光纤陀螺 IFOG 等。ESG的漂移可达10-4 /h;DTG的体积小、结构简单,随机漂移可达0.01 /h 量级;基于 Sagnac 干涉效应的环形激光陀螺和捷联式激光陀螺惯性导航系统(SINS)在民航方面得到应用,导航精度可达0.1n mile/h(海里/小时)。除此之外,超导体陀螺、粒子陀螺、音叉振动陀螺、流体转子陀螺及固态陀螺等基于不同物体原理的陀螺仪表相继设计成功。80年代,伴随着半导体工艺的成熟和完善,采用微机械结构和控制电路工艺制造的微机电系统(MEMS)开始出现。
当前,惯性技术正处于第四代发展阶段,其目标是实现高精度、高可靠性、低成本、小型化、数字化、应用领域更加广泛的导航系统。一方面,陀螺的精度不断提高,漂移量可达10-6 o/h;另一方面,随着激光陀螺、光纤陀螺、MEMS等新型固态陀螺仪的逐渐成熟,以及高速大容量的数字计算机技术的进步,捷联惯性导航系统在低成本、短期中精度惯性导航中呈现出取代平台式系统的趋势。要显著提高陀螺的敏感度,光波已经无法满足要求,在这种情况下,人们开始考虑利用原子波做波源。原子激光噪声小、波长短、频率高,可获得极高的灵敏度,因此原子陀螺及其系统具有极大的技术潜力。
据MIT Draper实验室对美国下一代惯性传感器的发展和应用进行了分析和预测,以下分别是2001/2005年的发展情况,以及对2020年的发展预测。从三个时间点的发展可以看出,2005年中精度机械陀螺大部分被光学陀螺取代;2020年高精度陀螺应用领域主要由高精度机械陀螺和光纤陀螺占领;2020年微机电/微光机电陀螺占领中低精度应用领域。
陀螺仪发展状况
2001 年陀螺仪发展状况

数据来源:中国报告网整理
2005 年陀螺仪发展状况

数据来源:中国报告网整理
2020年陀螺仪发展状况预测

数据来源:中国报告网整理
资料来源:中国报告网整理,转载请注明出处(ZQ)
更多好文每日分享,欢迎关注公众号

【版权提示】观研报告网倡导尊重与保护知识产权。未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明、联系方式等发邮件至kf@chinabaogao.com,我们将及时沟通与处理。